![[b][/b]](http://img.homepagemodules.de/ds/static/gaia/bold.png "[b][/b] einf³gen")
![[i][/i]](http://img.homepagemodules.de/ds/static/gaia/italic.png "[i][/i] einf³gen")
![[u][/u]](http://img.homepagemodules.de/ds/static/gaia/underline.png "[u][/u] einf³gen")
![[code][/code]](http://img.homepagemodules.de/ds/static/gaia/code.png "[code][/code]")
![[quote][/quote]](http://img.homepagemodules.de/ds/static/gaia/quote.png "[quote][/quote] einf³gen")
![[spoiler][/spoiler]](http://img.homepagemodules.de/ds/static/gaia/spoiler_neu.png "[spoiler][/spoiler] einf³gen")
![[url][/url]](http://img.homepagemodules.de/ds/static/gaia/link.png "[url][/url]")
![[img][/img]](http://img.homepagemodules.de/ds/static/gaia/picture.png "[img][/img]")
![[video][/video]](http://img.homepagemodules.de/ds/static/gaia/movie.png "[video][/video]")


![[pre][/pre]](http://img.homepagemodules.de/ds/static/gaia/pre.png "[pre][/pre] einf³gen")

-
-
Turtleman hat das Thema "Ankündigung - Agora FDNY Fire Truck" erstellt. 03.09.2021
-
Turtleman hat einen neuen Beitrag "Abgebrochen - Tamiya Mercedes Benz G500" geschrieben. 03.09.2021
Nachdem ich nun ein funktionstüchtiges Fahrwerk habe. wäre der nächste Schritt die Karrosserie. Allerdings kann ich mich für diese Art des Modellbaus noch nicht so ganz erwärmen. Für mich ist das Projekt erst einmal beendet. Ob ich mit den Erfahrungen später an anderer Stelle weiter arbeite muss ich erst sehen. Es war interessant, das Modell zu bauen, aber diese Art von Fahrzeugbau werde ich wohl nicht weiter verfolgen.
-
Turtleman hat einen neuen Beitrag "Läuft - Holzmechanik Aurora" geschrieben. 03.09.2021
Da ich gerade meine Bauberichte aufräume, auch hier ein Wort zum aktuellen Status. Das Projekt läuft aktuell weiter, aber mit einer sehr niedrigen Priorität. Die Fortschritte hier werden wohl sehr langsam weiter gehen.
-
Turtleman hat einen neuen Beitrag "Pausiert - DeAgostini X-Wing" geschrieben. 03.09.2021
Eine kleine Anmerkung zum aktuellen Status dieses Modells. Zur Zeit habe ich etwa 60 Bauphasen erhalten. Im Moment gibt es gerade Lieferschwierigkeitenm mit der Elektronik. Ich habe an diesem Modell noch nicht weiter gearbeitet, da ich hier besonderes vorhabe. Ich werde mit dem Bau wohl erst beginnen, wenn ich das gesamte Modell vorliegen habe. Und auch dann gibt es noch einige Dinge zu klären. Daher werde ich diesen Baubericht offiziell pausieren. Wann es hier weiter geht kann ich noch nicht absehen.
-
-
-
Turtleman hat das Thema "DeAgostini Sovereign of the Seas" erstellt. 27.06.2021
-
Turtleman hat einen neuen Beitrag "Abgeschlossen - DeAgostini Sovereign Of The Seas" geschrieben. 27.06.2021
So. Nun ist das Modell fertig. Leider fehlt mir noch ein passender Regalboden. Die Vitrine lässt sich nicht mehr über das Schiff stülpen, wenn dieses im Regal steht. Daher muss ich das Modell auf einen zweiten Regalboden stellen und dann zusammen mit der Vitrine in das Regal schieben. Dummerweise ist die Größe ein klein wenig besonders und zur Zeit nur schwer zu bekommen. Daher habe ich erst einmal ein anderen Brett als Provisorium genommen.
Das Modell mit Vitrine ist soweit vorbereitet.
Und hier steht das Modell an seinem Platz. Eine letzte Reise folgt noch wenn der richtige Regalboden eingetroffen ist. Bis dahin...
ENDE
-
Turtleman hat einen neuen Beitrag "Abgeschlossen - DeAgostini Sovereign Of The Seas" geschrieben. 27.06.2021
Die letzten Arbeiten am Modell haben begonnen. Zuerst einmal habe ich die Figuren plaziert. Zwei Figuren habe ich mal stellvertretend fotografiert. Die anderen Figuren lassen sich nur sehr schwer fotografieren. Da sind die ganzen Schiffsaufbauten im Weg.


Nun fehlen noch die Anker. Der vierte Ankert ist nun fertig. Der Balken hat leider einen etwas anderen Farbton. Tja, so ist das wenn man einen Anker vier Jahre später baut.
Der Bug des Scxhiffes mit den beiden Backbord Ankern. Hier sieht man auch das die Takelage, welche nicht gespannt wird, sondern einfach nur durchhängt, kein so richtig schönes Bild abgibt. Das Eigengewicht der Fäden ist einfach zu gering.
Hier sind die beiden Anker vertäut. Einer der beiden Anker ist ein Ersatzanker. Für den Fall das mal einer verloren geht.
Durch diese Augen werden die Seile der Anker nach innen geführt. Ich habe hier entsprechende Löcher gebohrt und die Fäden dann darin verklebt.
-
-
-
Turtleman hat einen neuen Beitrag "Abgeschlossen - DeAgostini Sovereign Of The Seas" geschrieben. 27.04.2021
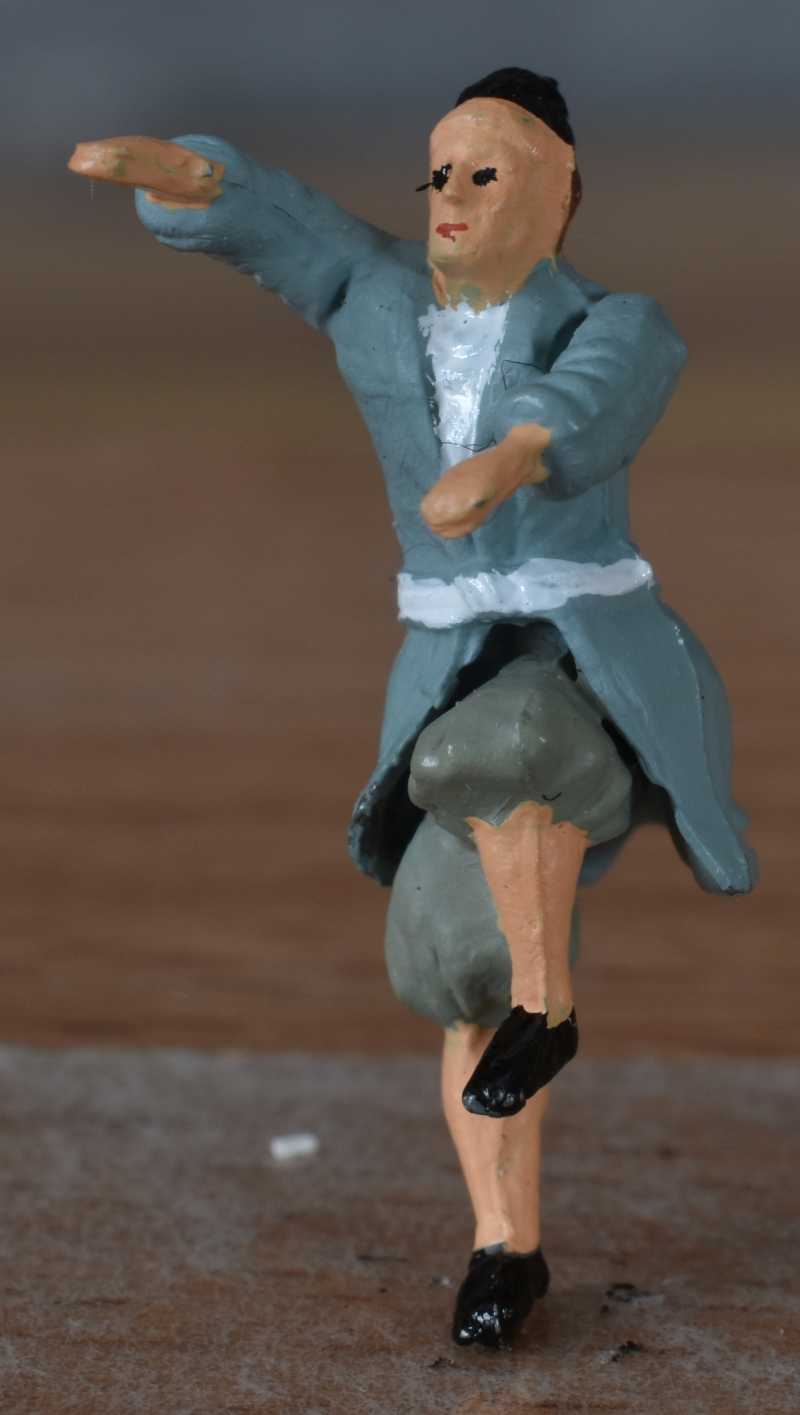
Die Figuren sind fertig bemalt. Nur gut das ich noch meine superfeinen Pinsel habe. Die Bemalung hat recht lange gedauert, da ich immer nur einen kleinen Teil bemalen konnte und dann die Figur erst wieder trocknen lassen musste. Hier einige Fotos von den fertigen Figuren. Es fehlen noch die beiden Kanoniere. Bei den Bilden bitte beachten, das die Figuren gerade einmal 2cm hoch sind!







-
Turtleman hat einen neuen Beitrag "Abgeschlossen - DeAgostini Sovereign Of The Seas" geschrieben. 27.04.2021
Nachdem nun alle Segel gesetzt sind, geht es mit den Restarbeiten weiter. Zunächst wird noch eine Leine am Ruderblatt angebracht. Diese wird nur lose durch alle Ringe von einer Seite zur anderendurchgezogen und an den letzten Ringen verknotet

Eine weitere Baustelle sind die Anker und ein verloren gegangener Stückpfortendeckel.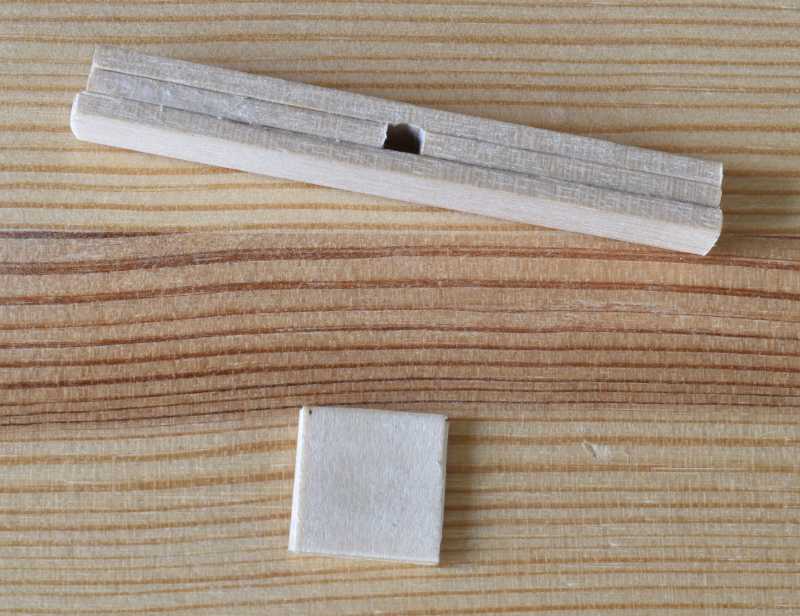
Auch die Flaggen sind nun alle gehisst. Ein schöner Zeitpunkt für eine neue Gesamtansicht.
Als letztes werden die Figuren auf dem Schiff montiert. Diese werden jetzt erst einmal vorbereitet. Einige Figuren müssen dazu noch zusammen geklebt werden.
-
-
-
Turtleman hat einen neuen Beitrag "Abgeschlossen - DeAgostini Sovereign Of The Seas" geschrieben. 22.03.2021
Auch bei diesen beiden Segeln werden die Brassen wieder an den Stagen befestigt. Von dort geht es hinunter zu den Nagelbänken.

Die Nagelbank an Steuerbord ist bis auf einen Nagel voll belegt.
Das hissen der Flaggen wird in der Bauannleitung als krönender Abschluss beschrieben. So weit bin ich zwar noch nicht, aber ich habe trotzdem damit begonnen. Zunächst werden die Flaggen an den Faden geklebt. Dazu wird der Faden mittig eingelegt und die Flagge dann umgeschlagen, so das die beiden Klebeflächen aufeinander liegen. Ich fand diese Art immer sehr unschön, da ich das nie so richtig hinbekommen habe. Mit den Flaggen hat das aber wunderbar funktioniert. Auch das Material der Flagge ist wirklich gut. Keine einfachen Sticker, sondern ein Matreial das auch ein wenig an Stoff erinert.
Die erste Flagge ist gehisst. Man sieht hier auch schön die Struktur des Materials. Ausserdem ist in diesem Bild auch zu sehen, das der Ringbolzen nach vorne zeigt, was etwas unschön ist, wenn die Flaggen nach hinten wehen sollen. Allerdings wehen bei einem Segelschiff unter vollen Segeln die Flaggen ja auch nicht nach hinten, sondern nach vorne. Schließlich kommt der Wind dann ja von hinten.
Einerseits sieht es trotzdem etwas komisch aus, auch wenn es natürlich physikalisch korrekt wäre. Andererseits sollten dann auch alle Flaggen nach vorne zeigen. Und das ist das Problem. Die große Flagge am Heck kann aus Platzmangel nicht nach vorne zeigen. Und das ist echt ein riesen Trumm. Also habe ich die Flaggen, wie in der Bauanleitung auch, nach hinten zeigend angebracht.
Am unteren Mastende kommen noch zwei Ringbolzen hinzu. An diesen Ringbolzen werden dann die Fäden der Flagge angeknotet. Man sollte die Rinbolzen unbeding setzen, bevor die Masten eingesetzt werden. An einem fast fertigen Modell an dieserr Stelle Löcher für die Ringbolzen zu bohren ist fast unmöglich. Daher sitzen auch beide Ringbolzen seitlich. Ein Loch von hinten zu bohren ist definitiv nicht machbar.
-
-
-
Turtleman hat einen neuen Beitrag "Abgeschlossen - DeAgostini Sovereign Of The Seas" geschrieben. 21.03.2021
Als letztes sind nun die beiden Segel am Bugspriet drann. Zuerst wieder das Segel an die Rah nähen. Die Rah hängt in diesem Fall unter dem Bugspriet. Daher gibt es hier sozusagen vier Rahfallen. Zwei gehen von der Rah direkt nach hinten zur Galeonsplattform und zwei weitere nach vorne zum Mars und von dort dann nach hinten.

Hier hängt nun die Rah unter dem Bugspriet. Laut Anleitung wird die Rah noch mit einem weiteren Faden direkt am Bugspriet befestigt. In den Bildern ist aber nichts zu sehen. Ich habe ihn erst mal weg gelassen.
Zwei Fäden habe ich provisorisch an der Klampe befestigt. Die anderen habe ich gleich an den richtigen Klampen belegt.
Ansonsten ist die Takelage wie bei den anderen Segeln. Nur werden hier fast alle Fäden am Bugspriet entlang geführt. Vor der endgültigen Befestigung aller Fäden habe ich auch das zweite Segel befestigt. So kann ich nun besser die Segel ausrichten.
Hier sieht man sehr schön, wie die Fäden entlang des Bugspriets geführt werden.
-
-
-
Turtleman hat einen neuen Beitrag "Abgeschlossen - DeAgostini Sovereign Of The Seas" geschrieben. 01.03.2021
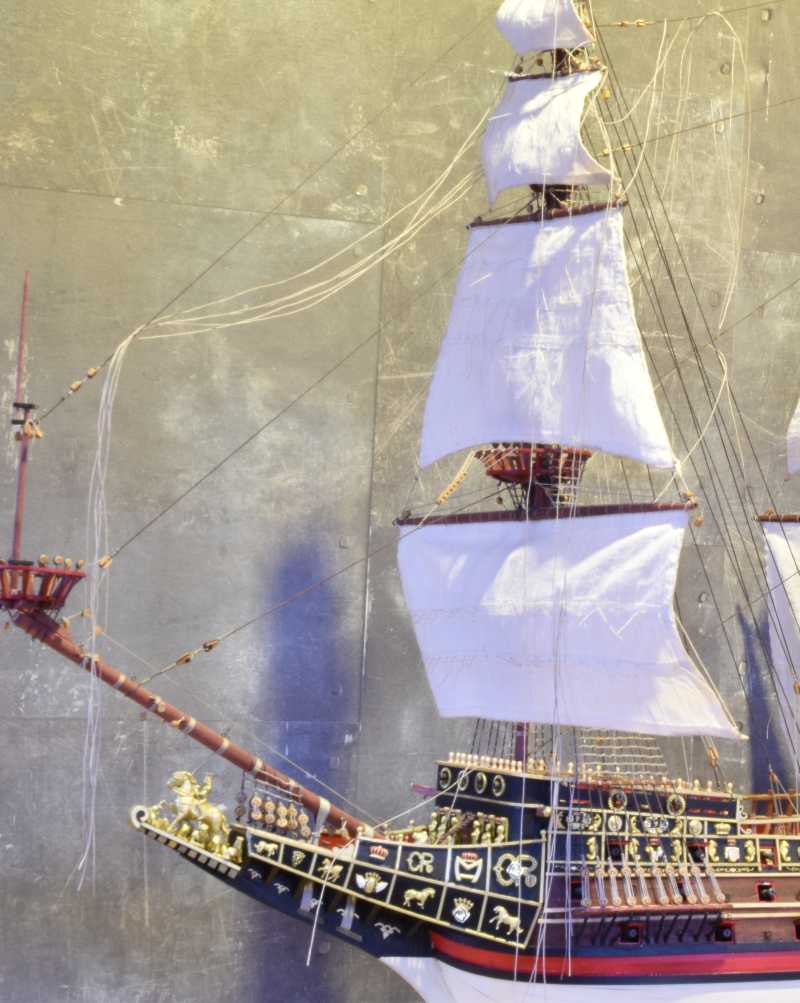
Mal wieder eine Gesamtansicht des Modells.

Nun sind alle drei Masten komplett mit Segeln versehen. Fehlt nur noch der Bugspriet. Mit den Wanten am Bugsprietmars habe ich schon begonnen.
Auf dem Achterdeck ist nun die gesamte Takelage vorhanden. Alle Ringe, Klampen und Belegnägel sind belegt.
Ein Foto vom letzten Segel. Ganz schön voll hier oben.
Und noch einmal ein Foto von der Takelage vor dem Mast. Die einzelnen Schritte habe ich diesmal nicht dokumentiert, da der Vorgang ja immer gleich ist. Am Bugspriet sieht das Ganze dann wieder etwas anders aus.
-
-
-
Turtleman hat einen neuen Beitrag "Abgeschlossen - DeAgostini Sovereign Of The Seas" geschrieben. 21.01.2021
Das Lateinsegel wird noch einmal zum Mast hin abgespannt. Der Faden teilt sich auf in vier Einzelfäden. Laut Mastplan teilt sich der Faden sogar noch weiter auf. Ich habe mich hier aber an die Bauanleitung gehalten. Vier Fäden unter gleicher Spannung anzubingen war schon nervig genug.

Der Faden, an dem das Lateinsegel hängt, ist im Ringbolzen auf der Steuerbordseite des Mastes befestigt. Auf der Backbordseite ist die schon eben erwähnte Abspannung befestigt.
Jetzt geht es wieder im alten Trott weiter. Das nächste Segel wird wieder auf die altbekannte Weise montiert.
Das Rahfall wird wieder auf deck befestigt. In den vorderen inneren Ringbolzen wird das untere Ende des Rahfall besfestigt. Der Faden zum Spannen kommt wieder an die daneben liegenden Klampen.
Für den Bugspriet habe ich schon einmal die Wanten vorbereitet. Diese werden demnächst auch befestigt. Bevor die Segel am Bugspriet montiert werden, sollten diese Arbeiten erledigt sein.
-
-
-
Turtleman hat einen neuen Beitrag "Abgeschlossen - DeAgostini Sovereign Of The Seas" geschrieben. 20.01.2021
Die untere Ecke des Segels wird an zwei Ringbolzen auf dem Deck befestigt. Hier ist noch viel Platz zum Arbeiten. Daher lässt sich diese Ecke noch gut verspannen.

Das untere Ende der Rah wird auf die gleiche Weise befestigt. Nur ist hier alles schon wesentlich voller. Die Arbeiten hier gehen nur mit langen Pinzetten und sind daher sehr fummelig.
Am oberen Ende der Rah werden zwei Takelblöcke befestigt. An diesen wird die Rah am Deck befestigt.
Die Fäden dafür werden zunächst an den Ringbolzen befestigt, dann durch die Takelblöcke gezogen und schließlich an den Klampen befestigt.
Der Flaggenmast ist mir bei den Arbeiten mal wieder abgebrochen. Den befestige ich jetzt aber erst ganz zum Schluss.
Das nächste Segel sieht mal wieder nicht so schön aus. Den umlaufenden Faden musste ich zunächst noch festnähen.
Die passende Rah dazu ist auch schon fertig. Im nächsten Schritt wird wieder das Segel an die Rah genäht. Tja, die Arbeiten sind halt bei allen Segeln gleich. Das Lateinsegel war die einzige Besonderheit bisher.
-
-
-
Turtleman hat einen neuen Beitrag "Abgeschlossen - DeAgostini Sovereign Of The Seas" geschrieben. 04.01.2021
Zunächst werden auch an dieser Rah die Toppnannten befestigt. Das Vorgehen dabei ist wie bisher bei allen Segeln. Hat man erst mal ein Segel montiert ist das Vorgehen eh bei allen gleich.

In diesem Fall werden die Toppnannten an zwei Klampen auf den Handläufen befestigt. Sie liegen in etwa unterhalb der Rah.
Jetzt kommen die Brassen. Diese werdem am Stag etwas unterhalb der Spinnenjuffer angeknotet. Wiederum etwas darunter sind dann die Takelblöcke angebracht. Die Brassen laufen also vom Stag zu den Enden der Rah, von dort zurück zum Stag durch die Takelblöcke, und dann hinunter zum Ringbolzen.
Geschickter Weise liegt der Ringbolzen mittig auf dem Deck zwischen den beiden Grätings. Ich habe ja versucht, mir aus der Bauanleitung alle Ringbolzen und Klampen im Vorfeld zusammen zu suchen und möglichst früh anzubringen. Dummerweise habe ich wohl nicht alle gefunden. Diesen Ringbolzen auf diesem vollen Deck zu setzten und dann noch die Fäden zu verknoten ist schon eine Herrausvorderung. Auch hierbei epmfehlen sich lange Pinzetten. Die sollten aber schon einigermaßen stabil sein.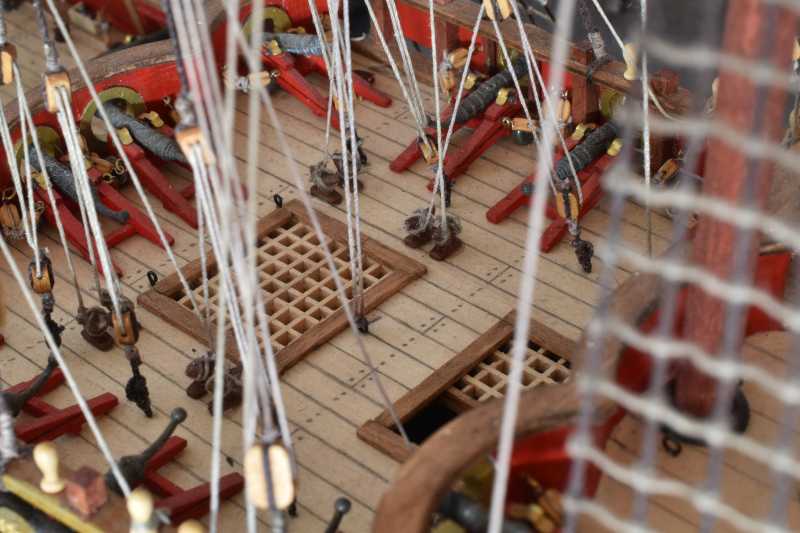
Das nächste Segel ist dann das Lateinsegel. Auf dem Foto ist das Segel schon ausgerichtet. Bei diesem Segel ist es von Vorteil, erst einmal alle Befestigungspunkte provisorisch zu vertäuen um dann nach und nach an allen Punkten die Spannung zu erhöhen und das Segel vernünftig auszurichten.
-
-
-
Turtleman hat einen neuen Beitrag "Abgebrochen - Tamiya Mercedes Benz G500" geschrieben. 01.01.2021
Die Federbeine sind am Rahmen montiert. Damit ist das Fahrgestell schon einmal soweit komplett und man bekommt ein Gefüht für die Federung.

An der Achse sind die Federbeine mit Kugelgelenken befestigt. Die Kugelkopfschrauben sind schon länger montiert. Nun werden die Federbeine lediglich aufgedrückt.
Im nächste Schritt geht es mit der Elektronik weiter. Daher war es nun an der Zeit die Fernsteuerung zu kaufen. Nach langem Überlegen habe ich mich für das Luxusmodell von Carson entschieden. Der einzige Nachteil ist, das es für diese Anlage nur einen Empfänger gibt. Somit gibt es für diese 14-Kanal Anlage auch nur einen 14-Kanal Empfänger. Kleinere Empfänger für kleine Modelle gibt es nicht. So brauche ich auch für dieses Modell einen 14-Kanal Empfängfer, auch wenn dieser ziemlich oversized ist.
Die 14 Kanäle brauche ich zwar vorerst nicht, sollte ich mich aber in diesem Bereich weiter austoben, möchte ich mir nicht noch eine Fernsteuerung kaufen. Dummerweise habe ich nicht gesehen, das die Fernsteuerung gleich mit Empfänger geliefert wird. Daher habe ich extra einen mit bestellt. Nun habe ich zwei davon. Dafür habe ich den Lenkservo vergessen. Also noch ein wenig warten.
-
-
-
Turtleman hat einen neuen Beitrag "Abgeschlossen - DeAgostini Sovereign Of The Seas" geschrieben. 27.12.2020
Die Brassen wurden als letztes befestigt. hier sieht amn die Befestigung an den Stagen. Von dort führen die Brassen nach unten zur Nagelbank.

Auch diese Belegnägel sind nun alle vollständig belegt.
Normalerweise ginge es ja nun mit dem Bugspriet weiter. Hier fehlen aber noch die Wanten. Und dafür benötige ich noch einige Jungfernblöcke, welche mir leider abhanden gekommen sind. Also musste ich sie nachbestellen. Daher mache ich jetzt erst einmal mit dem letzten Mast weiter. Dazu habe ich die ersten beiden Rahen vorbereitet.
Die Bauteile um die erste Rah zu befestigen. Das Rack habe ich diesmal etwas anders gefertigt. Anstatt zwei Fäden zu verwenden, welche dann an beiden Enden verknotet werden müssen, habe ich diesmal zur einen durchgängigen Faden verwendet. Somit habe ich auf einer Seite eine Schlaufe und spare mir einen Knoten.
Im Bild ist das Rack nach Anleitung gefertigt. Für den Mast ist es aber zu groß, daher habe ich nachträglich noch eine Schliete entfernt.
Die Rah ist am Mast befestigt.
Die Befestigung vom Rahfall an Deck. Das ganze läuft analog zu den anderen Masten.
Hier noch einmal die Rah von vorne mit Rahfall und Rahrack. An dieser Rah wird ja kein Segel befestigt, da dort das Lateinsegel sitzt. Trotzdem sind an dieser Rah alle Takelblöcke für das nicht vorhandene Segel besfestigt.
-
-
-
Turtleman hat einen neuen Beitrag "Abgeschlossen - DeAgostini Sovereign Of The Seas" geschrieben. 15.12.2020
Nun geht es an die Brassen. Auch hier arbeite ich mich wieder von unten nach oben.
Die Brassen werden am unteren Stag festgekonotet. Etwas darunter am Stag befinden sich zwei Takelblöcke Die Brassen führen zuerst zu den Enden der Rah und werden dort durch einen Takelblock geführt. Nun geht es zurück zu den Takelblöcken am Stag und von dort hinab zur Nagelbank am hinteren Ende des vorderen Deck. Dort werden die Brassen an den beiden inneren Belegnägeln befestigt.
Der Verlauf der Brassen ist von der Seite nicht eindeutig zu erkennen. Für die bessere Vorstellung hier noch ein Foto von oben.
Die Brassen werden zunächst an den Belegnägeln provisorisch befestigt. Wenn das Segel ausgerichtet ist, erfolgt die endgültige Befestigung.
-
-
-
Turtleman hat einen neuen Beitrag "Abgeschlossen - DeAgostini Sovereign Of The Seas" geschrieben. 11.12.2020
Alle vier Segel hängen am Mast. Die Takelage, abgesehen von den Brassen, ist erst einmal am Segel befestigt. Bevor ich mit den Brassen beginne, wird erst einmal die bisherige Takelage an den Belegnägeln befestigt. Die Brassen liegen dafür im Weg, daher kommen diese zum Schluss.
Die Toppnannten und Geitaue werden an den seitlichen Belegnägeln befestigt. Und zwar das unterste Segel vorne und das oberste Segel hinten. Ein Belegnagel ist noch frei. Die Geitaue des ersten Segel sind noch nicht endgültig montiert. Hier musste ich erst noch das Segel etwas nacharbeiten. Auf einer Seite war es etwas zu stark gewölbt.
Die Schoten der drei oberen Segel werden im vorderen Bereich befestigt. Damit sind auch hier schon einmal sechs Belegnägel belegt. Im Hintergrund sieht man die Steuerbordseite mit den benutzten Belegnägeln. Rechts im Bild die noch freie Nagelbank für die Brassen.
-
-
-
Turtleman hat einen neuen Beitrag "Abgeschlossen - DeAgostini Sovereign Of The Seas" geschrieben. 20.11.2020
Zeit für das nächste Segel. Als ich dieses nun an die vorbereitete Rah annähen wollte, musste ich feststellen, das die Ösen an den Ecken viel zu groß sind. So lässt sich das Segel unmöglich befestigen. Es hilft nichts. Das muss geändert werden.
Also habe ich die Schnur, welche einmal um das Segel herum läuft, abgelöst und neu vernäht. Diese Arbeit ist gar nicht so schwer zu erledigen.
Das Ergebnis ist sehr zufriedenstellend. So lässt sich das Segel vernünftig an der Rah annähen.
Das so veränderte Segel hängt nun auch am Mast. Alle drei Segel hängen zunächst nur am Rahfall. Daher sieht im Moment noch alles etwas schief aus.
Rahfall zwei und drei sind nun fertig verlascht.
Und nun noch Rahfall Nummer vier. Dieser ist aber erst einmal prrovisorisch befestigt.
Hier sieht man die Leinenführung am Mast. Noch hängen diese lose hinab.
-
-
Kommentar von (gel÷scht)
Guten Tag,
ich habe den Beitrag der Holzuhr von Ihnen gesehen, ich würde mich für mehr Details interessieren.
bitte um Rückmeldung,
martinkollross@gmail.com
