 Turtlemans Modellbau Forum
£
Bauberichte
£
Bauberichte Abgeschlossen
£
Abgeschlossen - DeAgostini R2D2
Turtlemans Modellbau Forum
£
Bauberichte
£
Bauberichte Abgeschlossen
£
Abgeschlossen - DeAgostini R2D2

 Thema drucken
Thema drucken
 15.07.2020 21:10
15.07.2020 21:10
|
|
Die aktuelle Lieferung kam mit einer Woche Verspätung. Enthalten sind die Lagerung für den Dome, die letzten Bauteile für die Körperschale mit Werkzeug und der Boden mit Schalter und Ladebuchse. Auch ein kleiner Schraubendreher ist dabei. Warum auch immer. Erstens ist der natürlich totaler Billigschrott und andererseits ist dies ja nicht der erste Bauabschnitt, bei dem ein Schraubendreher benutzt wird. |




 Antworten
Antworten
|
|
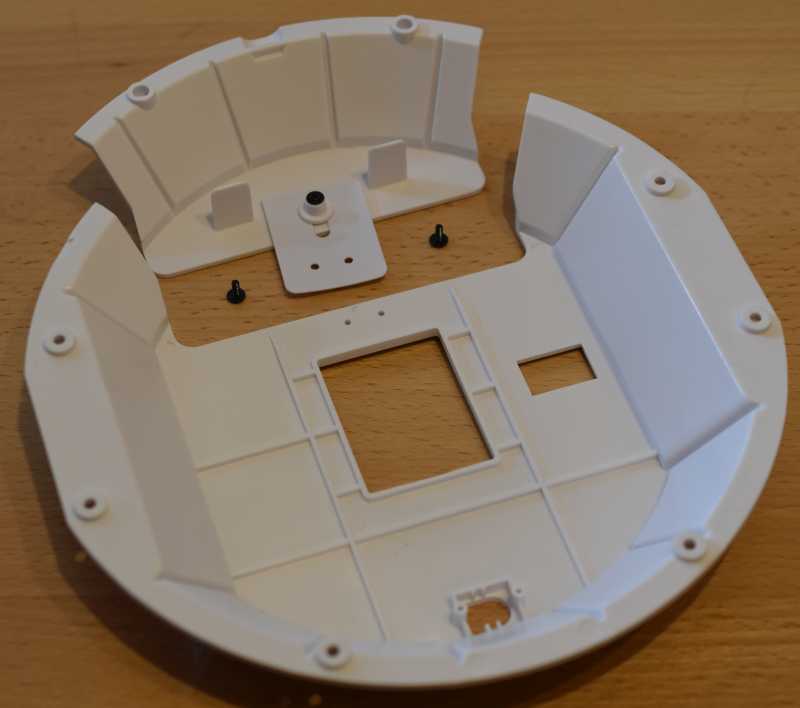
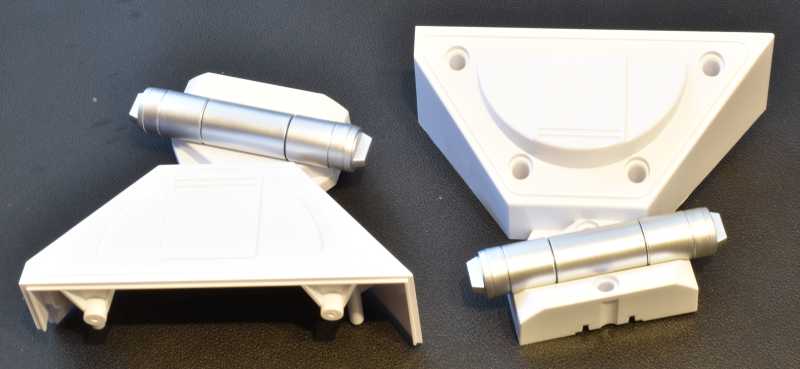
Nun komme ich zum Boden. Dieser hat einen Deckel, welcher sich später öffnen lässt. Hier wird ein kleiner Plastikstreifen aufgeschraubt. Dieser dient später als "Scharnier". |




|
|
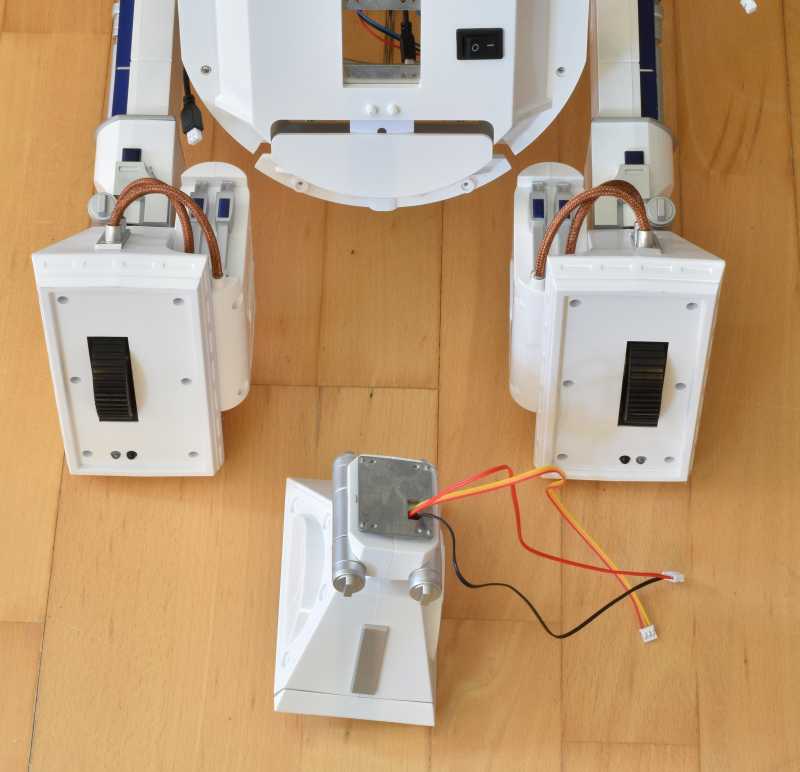
Die neue Lieferung ist wie die letzte pünktlich mit zwei Wochen Verzögerung eingetroffen. Diese Lieferung besteht fast nur aus dem dritten Fuß. Dazu noch die Batteriebox und ein Ladegerät für die Akkus. |


 #
#

|
|
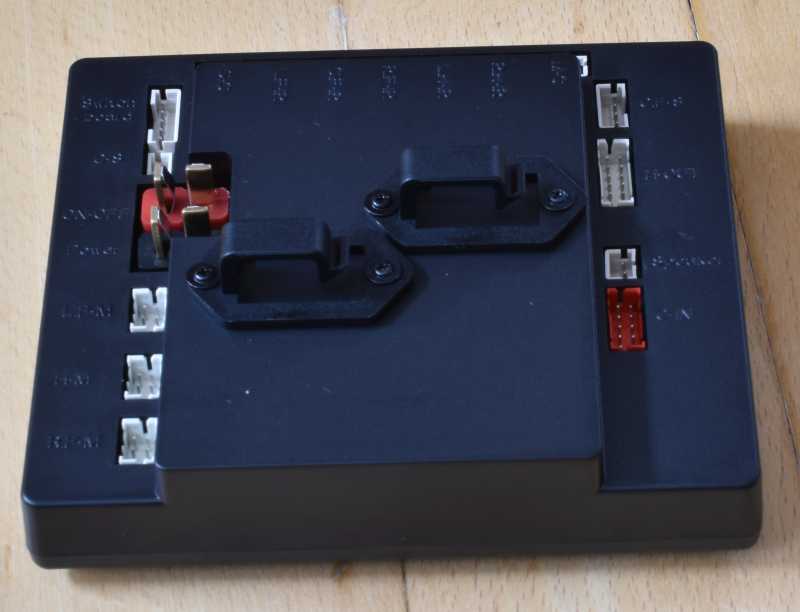
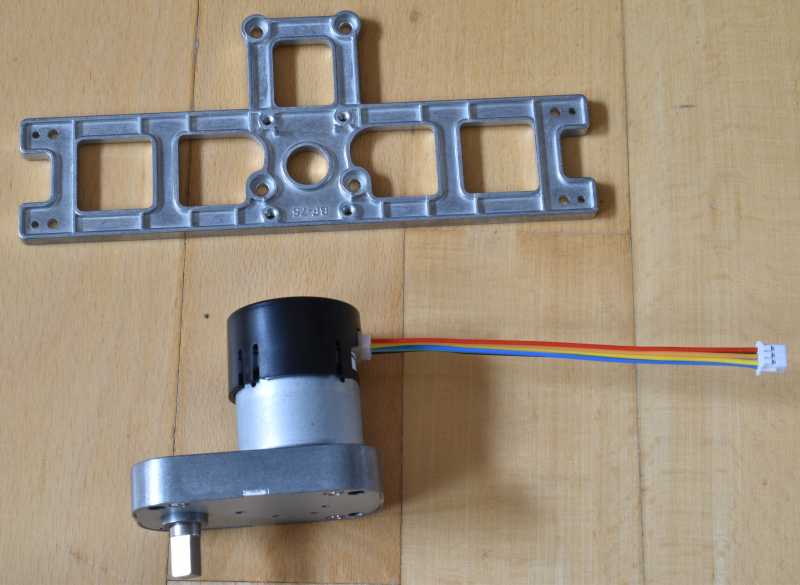
Die vorletzte Lieferung ist eingetroffen. Diesmal dabei sind die Hauptelektronik, Ein Gehäuse für die schon vorhandene Platine, Halterungen für das Batteriefach und die Elektronik und die Teile für den Domeantrieb. |




|
|
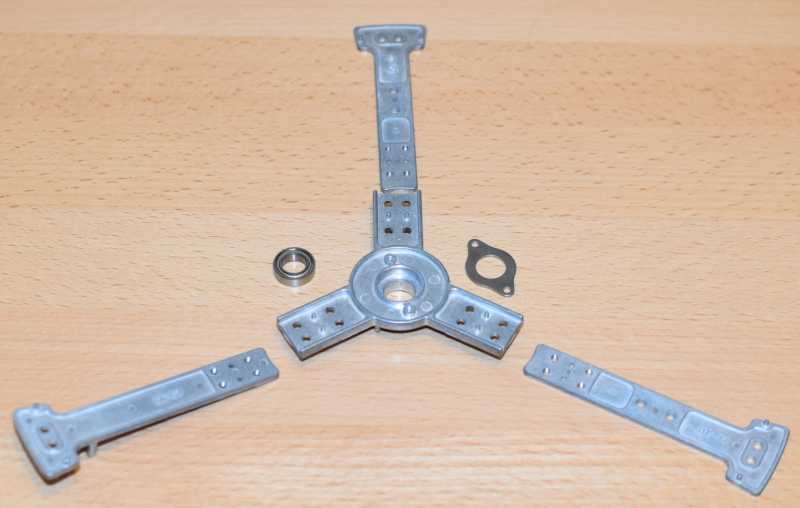
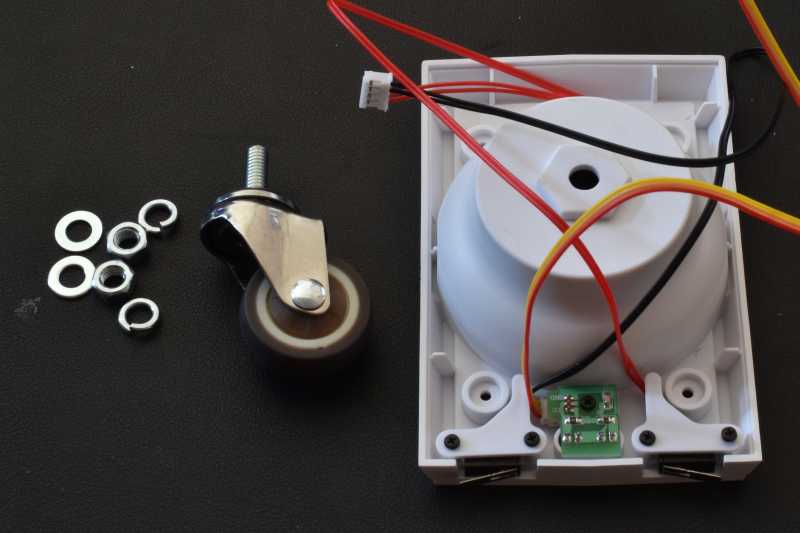
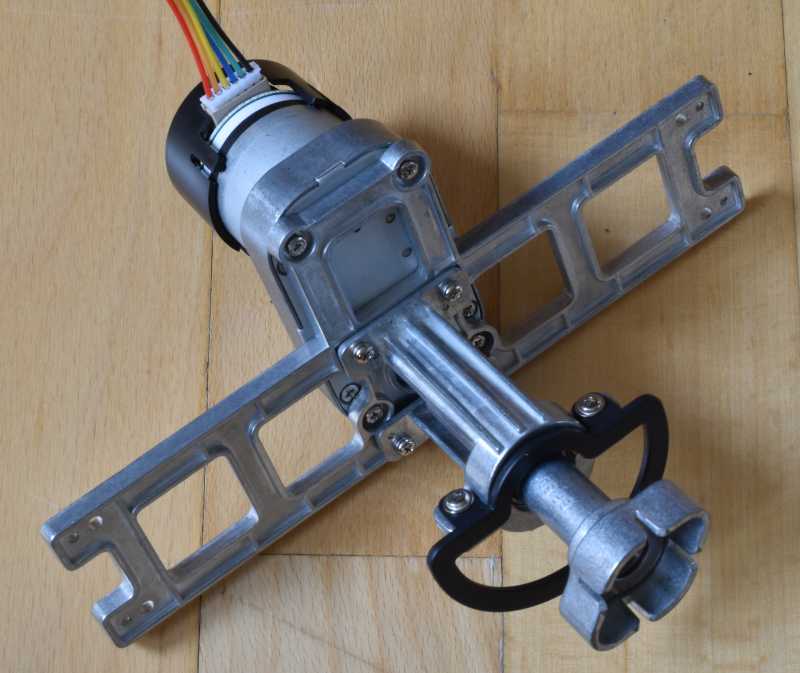
Es folgt der Antrieb für den Dome. Dazu wird der Mitnehmer erst einmal mit einem Kugellager ausgestattet. |





|
|
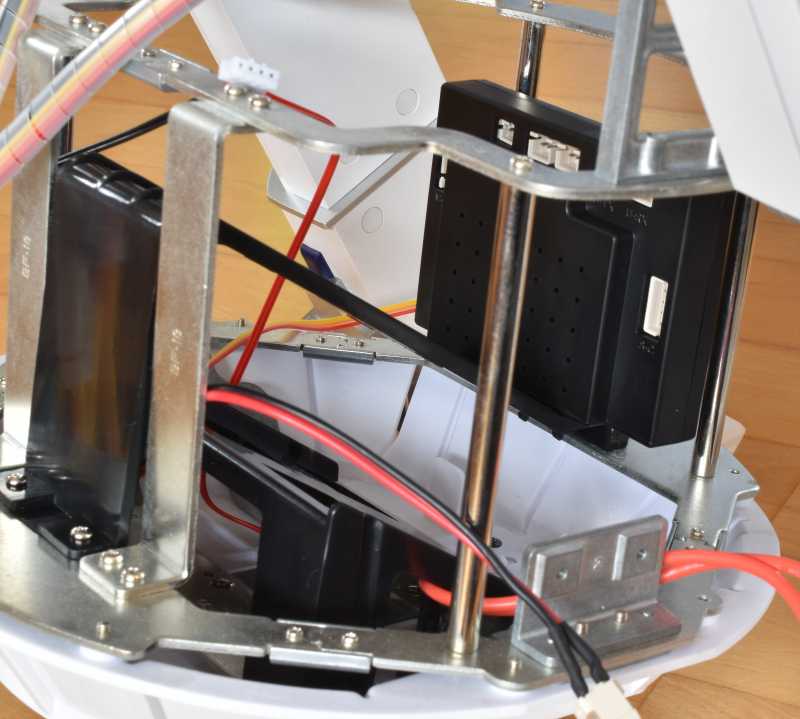
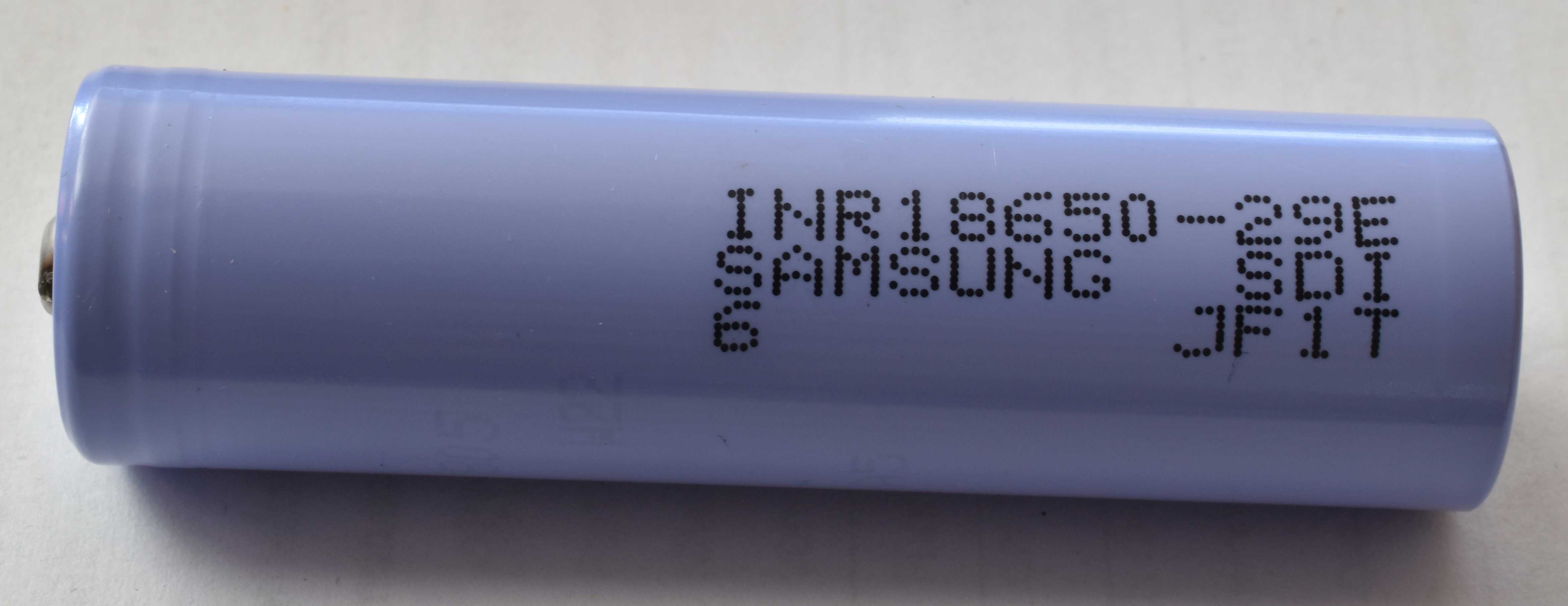
Es ist an der Zeit, mal ein paar Worte über die Akkus zu verlieren. Vor einiger Zeit, als das Thema auf ModelSpace noch aktuell war, gab es dort heftige Diskussionen wegen der Akkus. Auslöser war, wenn ich mich recht erinnere, eine etwas unglückliche Anleitung seitens ModelSpace. Da ich nun alles hier vorliegen habe, kann ich jetzt mit einigen Fakten aufwarten. |

|
|
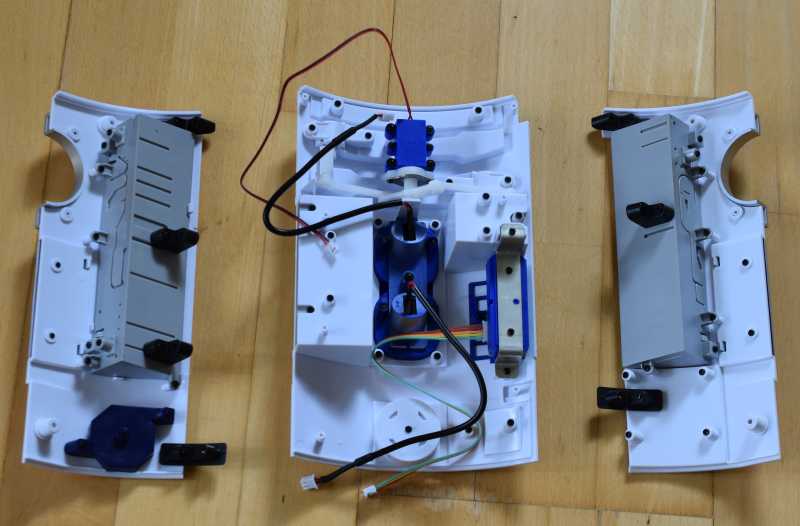
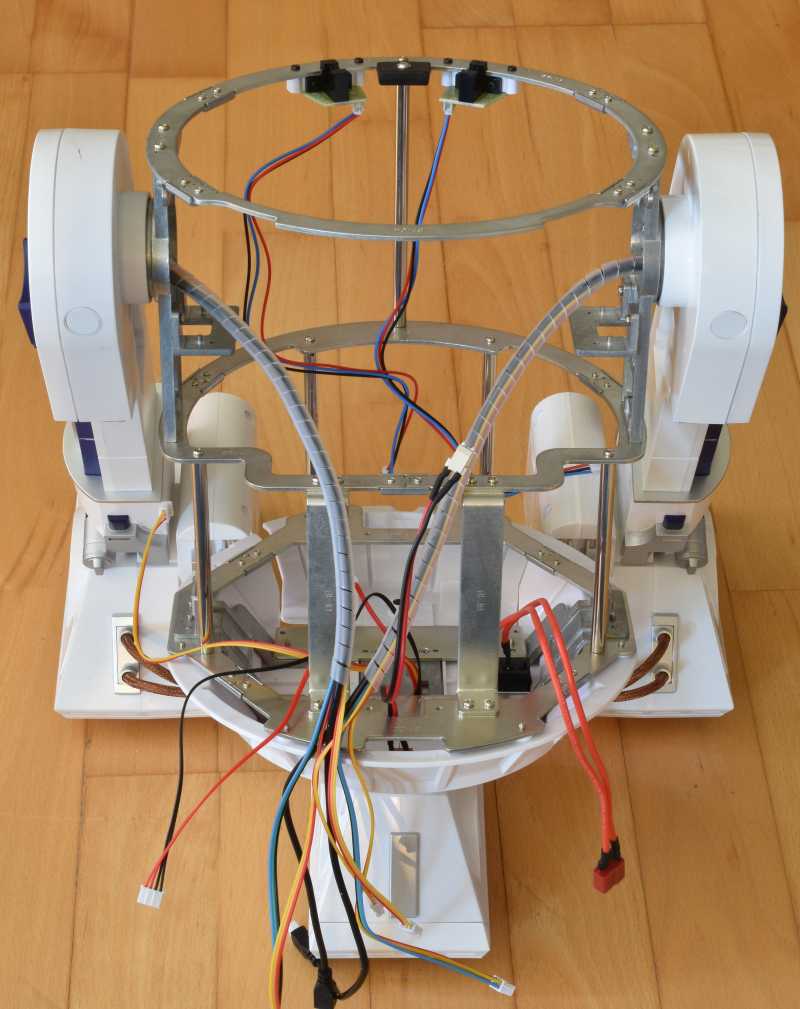
Die letzte Lieferung ist eingetroffen. Nun kann die Endmontage abgeschlossen werden. Diesmal dabei ist das Netzteil, natürlich für UK, die Kamera, Befestigungsmaterial, die Elektronik für den Dome und eine Menge Markierungsclipse für die Kabel. |





|
|
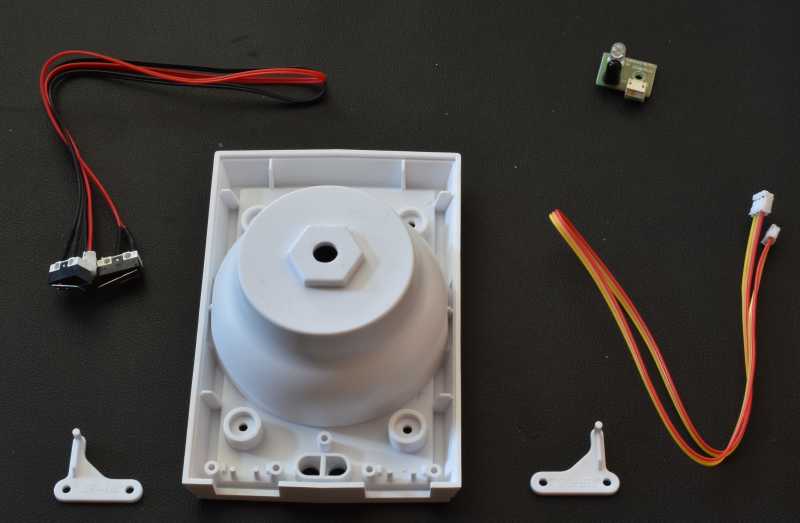
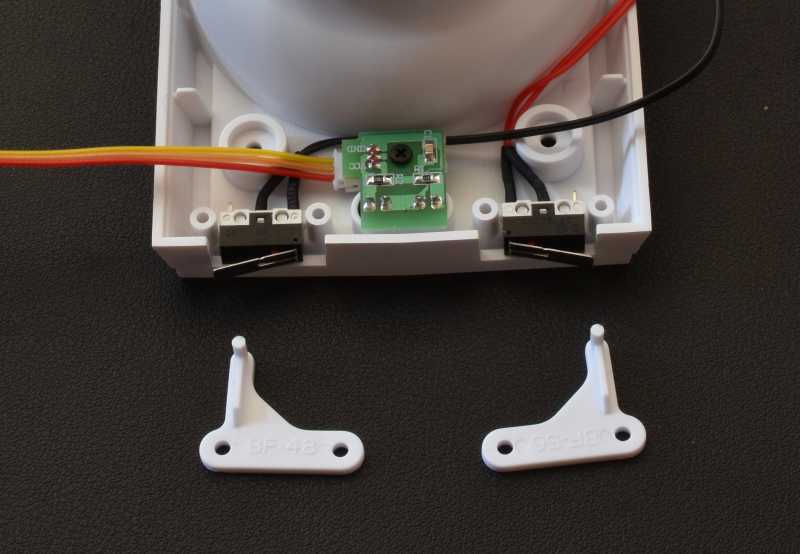
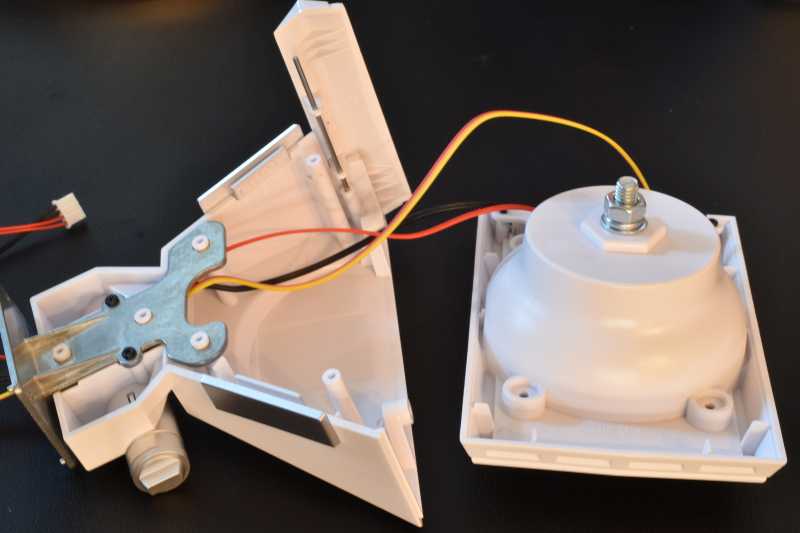
Der Dome hat neben den Gabellichtschranken, welche das Ende der Drehbewegung des Dome festlegen sollen, noch einen mechanischen Anschlag. Dieser wird nun ausgetauscht. In dieser letzten Lieferung sind wohl noch einige kleine Fehler ausgebügelt worden. |





|
|
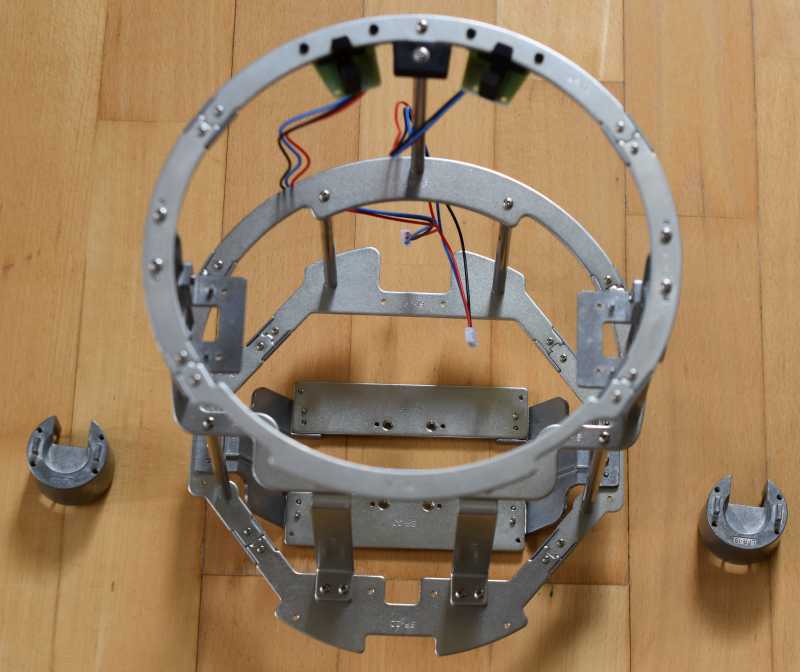
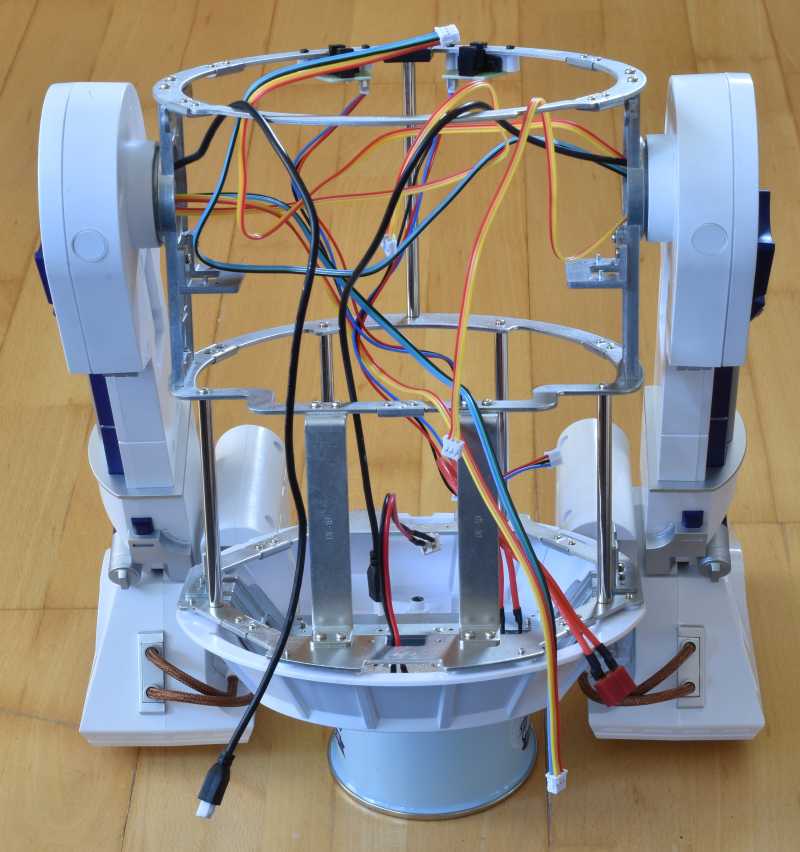
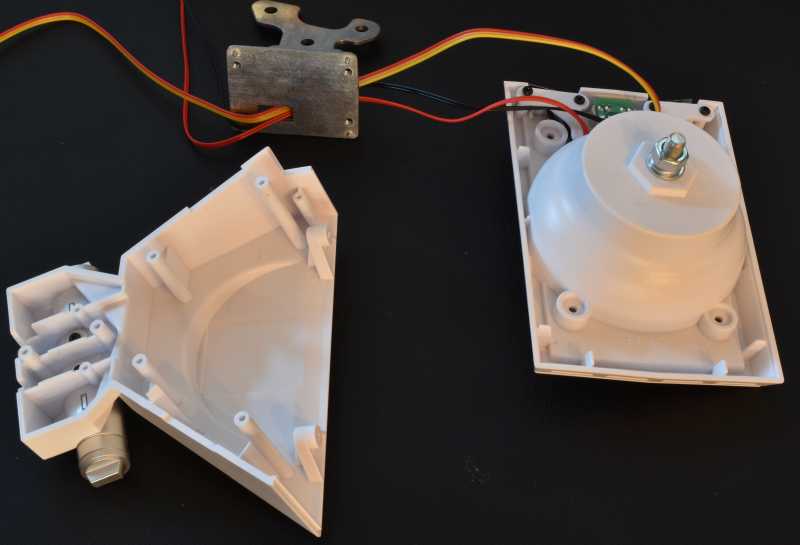
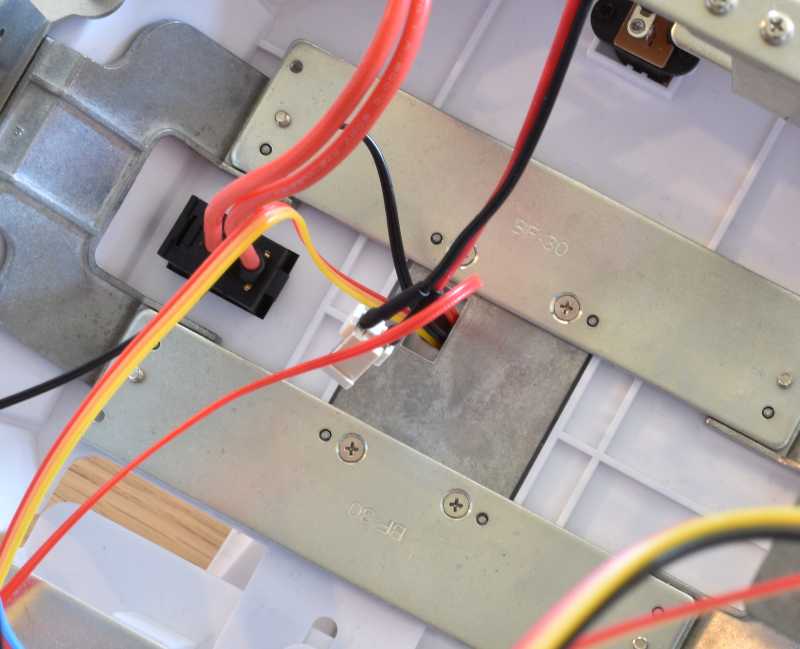
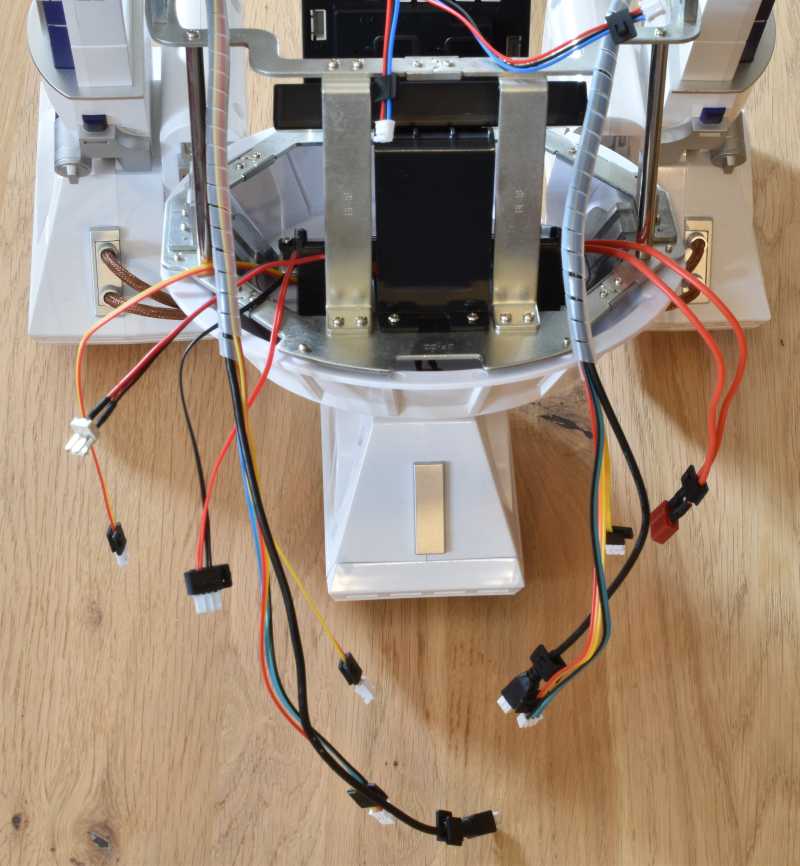
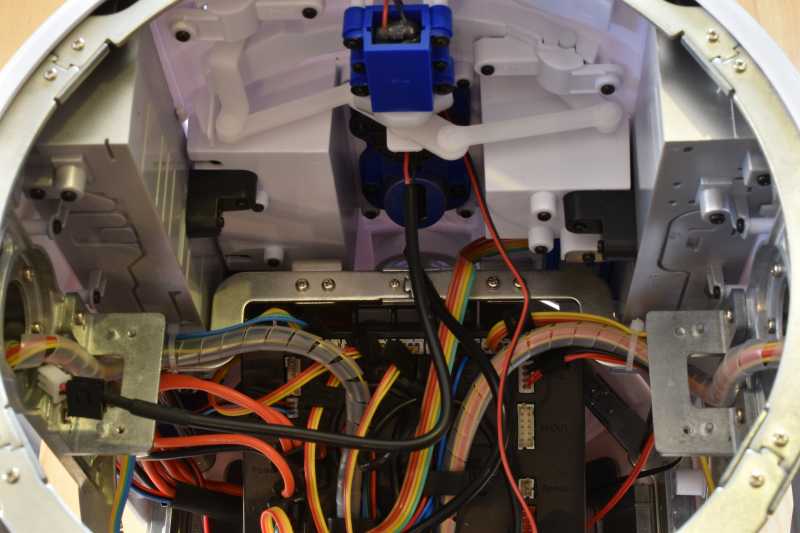
Die Kabel müssen am Metallrahmen befestigt werden, damit diese nicht mit bewegten Teilen in Berührung kommen. |




|
Baggio
(
Gast
)

|
Hallo. Köntest du Helfen. Habe den R2D2 fertig gebaut, aber wenn ich Einschalte dan dreht sich der Kopf bis anschlag und schaltet nicht aus. Rote licht leuchtet auch und fährt 3OScm. |
